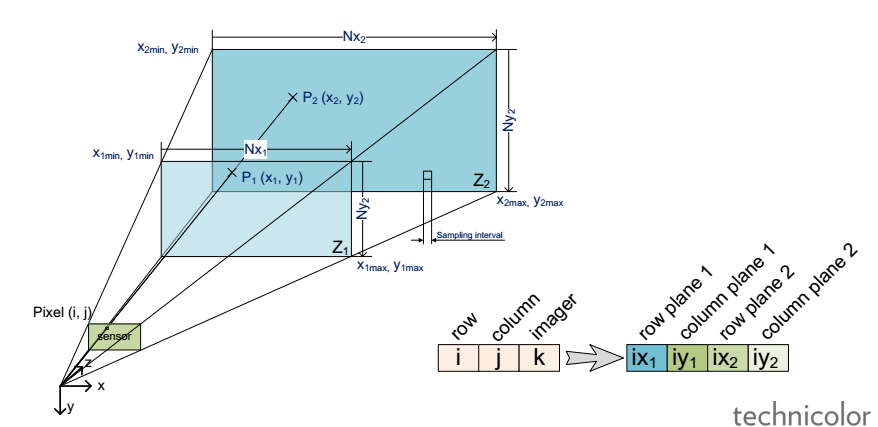
Light-field (LF) is foreseen as an enabler for the next generation of 3D/AR/VR experiences. However, lack of unified representation, storage and processing formats, variant LF acquisition systems and capture-specific LF processing algorithms prevent cross-platform approaches and constrain the advancement and standardization process of the LF information. In this work we present our vision for camera-agnostic format and processing of LF data, aiming at a common ground for LF data storage, communication and processing. As a proof-of-concept for camera-agnostic pipeline, we present a new and efficient LF storage format (for 4D rays) and demonstrate feasibility of camera-agnostic LF processing. To do so, we implement a camera-agnostic depth extraction method. We use LF data from a camera-rig acquisition setup and several synthetic inputs including plenoptic and non-plenoptic captures, to emphasize the camera-agnostic nature of the proposed LF storage and processing pipeline.
“Camera-agnostic format and processing for light-field data“, Mitra Damghanian, Paul Kerbiriou, Valter Drazic, Didier Doyen, Laurent Blondé, 2017 IEEE International Conference on Multimedia & Expo Workshops (ICMEW), 10-14 July 2017
Skip to PDF content
Skip to PDF content
Light field imaging is recently made available to the mass market by Lytro and Raytrix commercial cameras. Thanks to a grid of microlenses put in front of the sensor, a plenoptic camera simultaneously captures several images of the scene under different viewing angles, providing an enormous advantage for post-capture applications, e.g., depth estimation and image refocusing. In this paper, we propose a fast framework to re-grid, denoise and up-sample the data of any plenoptic
camera. The proposed method relies on the prior sub-pixel estimation of micro-images centers and of inter-views disparities. Both objective and subjective experiments show the improved quality of our results in terms of preserving high frequencies and reducing noise and artifacts in low frequency content. Since the recovery of the pixels is independent of one another, the algorithm is highly parallelizable on GPU.
“On plenoptic sub-aperture view recovery“, Mozhdeh Seifi, Neus Sabater, Valter Drazic, Patrick Pérez, 24th European Signal Processing Conference (EUSIPCO), 29 Aug.-2 Sept. 2016
Skip to PDF content
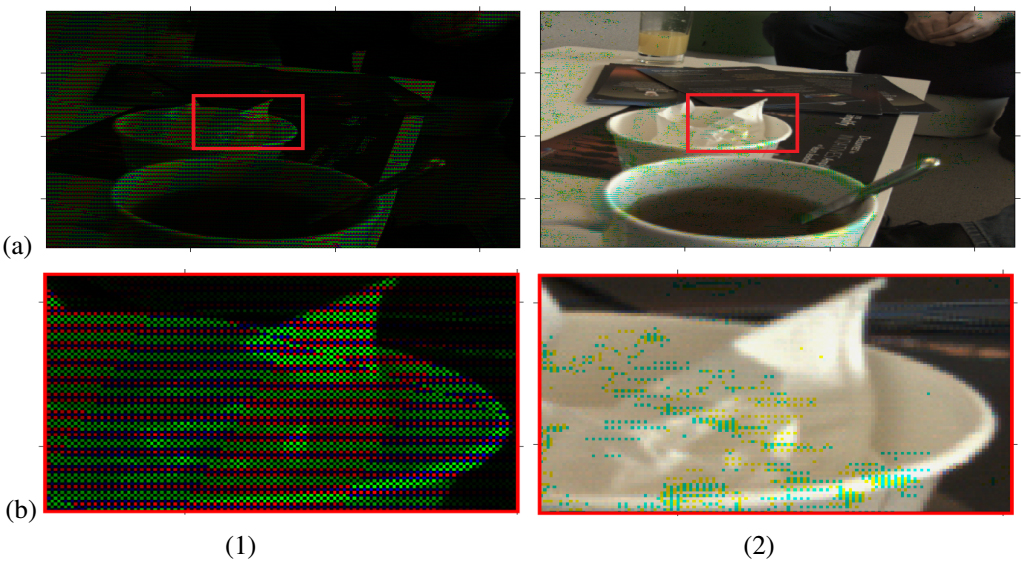
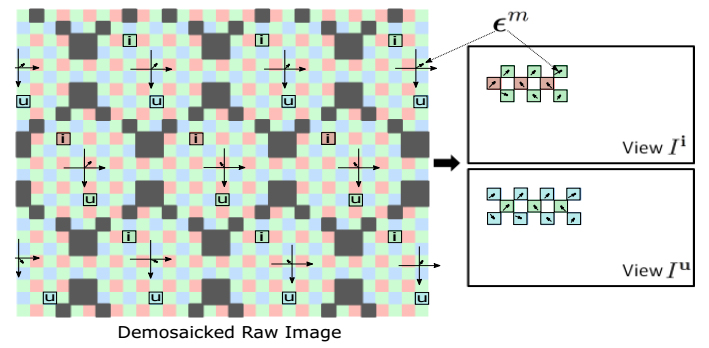
Light-field imaging has been recently introduced to mass market by the hand held plenoptic camera Lytro. Thanks to a microlens array placed between the main lens and the sensor, the captured data contains different views of the scene from different view points. This offers several post-capture applications, e.g., computationally changing the main lens focus. The raw data conversion in such cameras is however barely studied in the literature. The goal of this paper is to study the particularly overlooked problem of demosaicking the views for plenoptic cameras such as Lytro. We exploit the redundant sampling of scene content in the views, and show that disparities estimated from the mosaicked data can guide the demosaicking, resulting in minimum artifacts compared to the state of art methods. Besides, by properly addressing the view demultiplexing step, we take the first step towards light field super-resolution with negligible computational overload.
“Disparity-guided demosaicking of light field images“, M. Seifi, N. Sabater, V. Drazic, P. Perez, IEEE International Conference on Image Processing (ICIP), 2014
Skip to PDF content
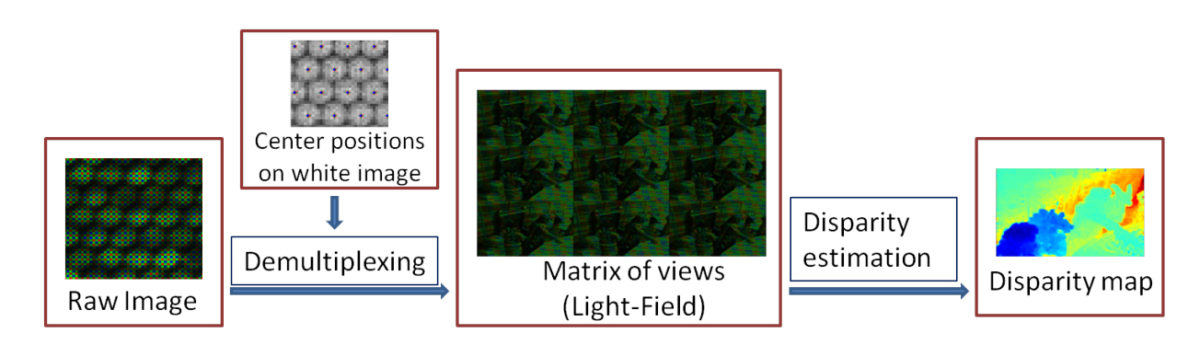
In this paper we propose a post-processing pipeline to recover accurately the views (light-field) from the raw data of a plenoptic camera such as Lytro and to estimate disparity maps in a novel way from such a light-field. First, the microlens centers are estimated and then the raw image is demultiplexed without demosaicking it beforehand. Then, we present a new block-matching algorithm to estimate disparities for the mosaicked plenoptic views. Our algorithm exploits at best the configuration given by the plenoptic camera: (i) the views are horizontally and vertically rectified and have the same baseline, and therefore (ii) at each point, the vertical and horizontal disparities are the same. Our strategy of demultiplexing without demosaicking avoids image artifacts due to view cross-talk and helps estimating more accurate disparity maps. Finally, we compare our results with state-of-the-art methods.
“Accurate Disparity Estimation for Plenoptic Images“, N. Sabater, M. Seifi, V. Drazic, G. Sandri, P. Perez, European Conference on Computer Vision (ECCV) 2014 Workshops.
Skip to PDF content