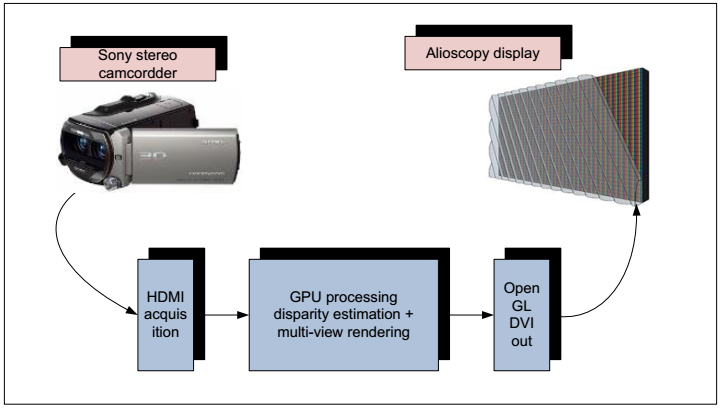
As often declared by customers, wearing glasses is a clear limiting factor for 3D adoption in the home. Auto-stereoscopic systems bring an interesting answer to this issue. These systems are evolving very fast providing improved picture quality. Nevertheless, they require adapted content which are today highly demanding in term of computation power. The system we describe here is able to generate in real-time adapted content to these displays: from a real-time stereo capture up to a real-time multi-view rendering. A GPU-based solution is proposed that ensures a real-time processing of both disparity estimation and multi-view rendering on the same platform.
“A real-time 3D multi-view rendering from a real-time 3D capture”, D. Doyen, S. Thiebaud, V. Drazic, C. Thébault. Vol. 44, N°. 1 July, 578-581, SID 2013
Skip to PDF content
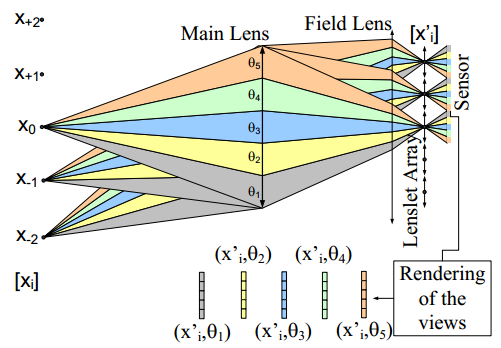
A plenoptic camera is a natural multiview acquisition device also capable of measuring distances by correlating a set of images acquired under different parallaxes. Its single lens and single
sensor architecture have two downsides: limited resolution and limited depth sensitivity. As a first step and in order to circumvent those shortcomings, we investigated how the basic design parameters of a plenoptic camera optimize both the resolution of each view and its depth-measuring capability. In a second step, we built a prototype based on a very high resolution Red One® movie camera with an
external plenoptic adapter and a relay lens. The prototype delivered five video views of 820 × 410. The main limitation in our prototype is view crosstalk due to optical aberrations that reduce the depth accuracy performance. We simulated some limiting optical aberrations and predicted their impact on the performance of the camera. In addition, we developed adjustment protocols based on a simple pattern and analysis of programs that investigated the view mapping and amount of parallax crosstalk on the sensor on a pixel basis. The results of these developments enabled us to adjust the lenslet array with a submicrometer precision and to mark the pixels of the sensor where the views do not register properly.
“Optimal design and critical analysis of a high-resolution video plenoptic demonstrator“, V. Drazic, JJ Sacré, A. Schubert, J. Bertrand, E. Blondé. Proceedings Volume 7863, Stereoscopic Displays and Applications XXII; 786318 (2011) , IS&T/SPIE Electronic Imaging, 2011, San Francisco
Skip to PDF content