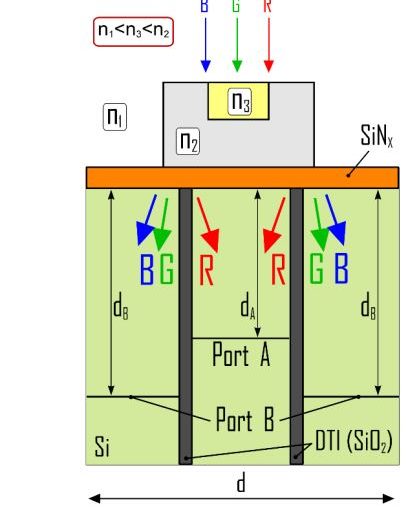
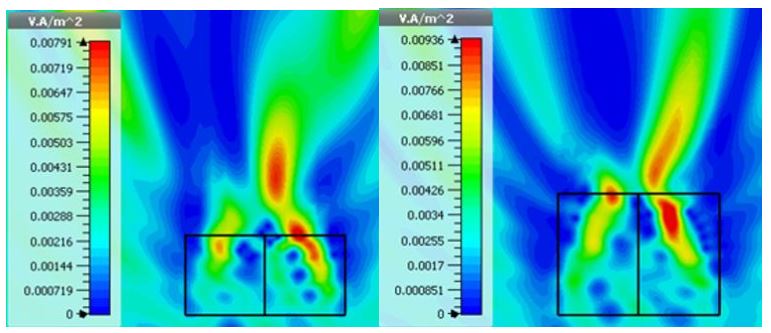
We propose a new type of color splitter, which guides a selected bandwidth of incident light to-wards the proper photosensitive area of the image sensor by exploiting the nanojet (NJ) beam phenomenon. Such splitting can be performed as an alternative to filtering out part of the re-ceived light on each color subpixel. We propose to split the incoming light thanks to a new type of NJ-based near-field focusing double-material element with an insert. To suppress crosstalk, we use a Deep-Trench-Isolation (DTI) structure. We demonstrate that the use of a dielectric insert block allows for reduction in the size of the color splitting element. By changing the position of the DTI, the functionality of separating blue, green and red light can be improved.
“Optical efficiency enhancement of nanojet-based dielectric double-material color splitters for image sensor applications .“, Oksana Shramkova *, Valter Drazic, Bobin Varghese, Laurent Blondé and Valerie Allié , Nanomaterials 10th November 2021.
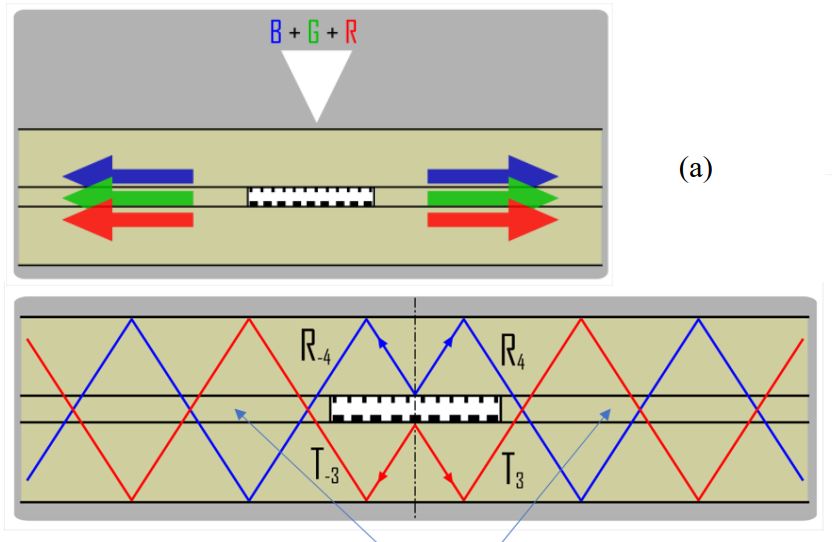
In this work we propose a new type of metagrating solution based on a combination of two diffraction gratings embedded inside the waveguide. We demonstrate that the proposed design has high intensity across a wide angular range and can be used as single waveguide full color combiner for AR application.
“Full color waveguide combiner with embedded metagrating.“, O. Shramkova, L. Blondé, V. Drazic, B. Varghese, V. Allié, 15th International Congress on Artificial Materials for Novel Wave Phenomena – Metamaterial 2021, New-York, USA.
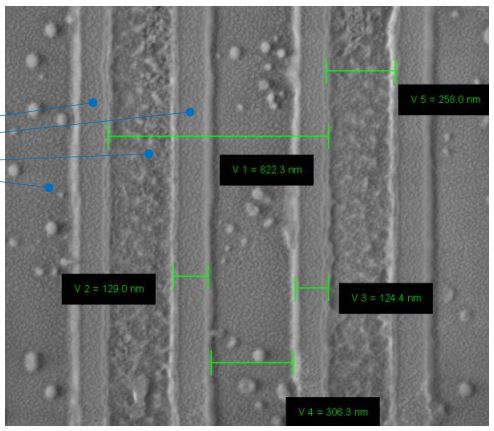
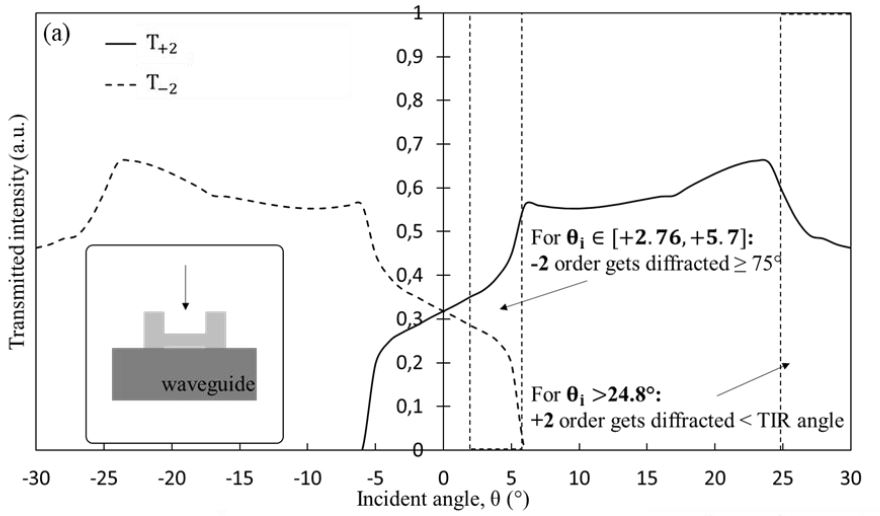
In this work we propose a new type of symmetrical surface relief diffractive grating for waveguide-based Augmented Reality near-eye display system with a wide Field of View (FoV). We demonstrate that by using a dual-mode symmetrical in-coupling system and angular pupil tiling, we can extend the overall horizontal FoV. Our grating coupler is optimized for the second diffraction orders. The proposed concept is validated numerically via full-wave electromagnetic analysis of a 1D diffraction grating. Measurements of the diffraction efficiency of the micro-fabricated prototype are compared with the results of the numerical simulation
“High-uniformity dielectric U-shaped surface relief grating coupler for AR headsets.“, O. Shramkova, V. Drazic, B. Varghese, L. Blondé, V. Brac De La Perriere, V. Allié, SPIE Nanoscience and Engineering, 2021, San Diego, USA.
There are multiple challenges to realize waveguide-based Surface Relief Gratings (SRG) for combiners in Augmented Reality (AR) applications: fabricability, efficiency and diffraction uniformity are among the most important ones. Interdigital develops SRG using Edge Waves (EW) to design highly efficient gratings with a high angular robustness. An EW is generated by a diffraction phenomenon appearing at the interface between two dielectric media and its direction of propagation is controlled by the index ratio between the two media and the direction of the incident plane wave. Combining different edges together, we optimize the elementary geometry, i.e., the building block of an SRG, to diffract into the direction defined by the grating equation, optimizing the power transfer of the incident light into the direction of interest. Our approach enables symmetrical structures with low aspect-ratio, optimized for coupling very efficiently into the first or second order modes, the latter leads to over-wavelength pitch sizes. Moreover, our SRG is designed to angularly tile the exit pupil of the light engine without losses, making our structures adapted to any sort of light engines. Based on our unique design concept, we present in-couplers using two waveguides with a field of view of 130 degrees and RGB operation, and a one waveguide system with 90 degrees of field of view and RGB operation, both with a wafer having also an index of refraction of about 1.7. We believe this will pave the way to new DOE combiners for future AR glasses.
“High-uniformity, high-performance double material dielectric diffractive metagratings.“, Valter Drazic , Oksana Shramkova, Bobin Varghese, Laurent Blondé, Valérie Allié, 1SPIE Photonics West, Augmented, Virtual and Mixed Reality (AR, VR, MR) II, March 2021, San Francisco, USA.
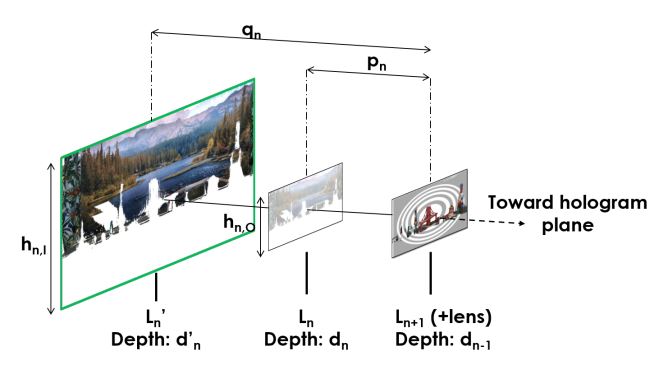
From its Nobel prize winning discovery by Denis Gabor over half a century ago, Holography has been alternately put in the spotlight as a promising technique for its capacity of displaying 3D scenes, to be later forgotten regarding the complexity of performing holographic recording outside from optical laboratories. The later development of high resolution microdis-plays, high capacity CPU and GPU units raised the interest of using Holography as a mean to reproduce dynamic 3D scenes through the computation of holograms and the display of the associated interference pattern on a Spatial Light Modulators (SLMs). The computation process can for example be performed from a layered Computer Generated (CG) scene, using well-known convolution methods or other transfer function models from Fourier optics. The simplicity and speed of this technique is unfortunately compensated by its limitation to small object and scenes. We here want to demonstrate the possibility to use similar techniques to compute holograms of larger field of view, using perspective-projection layered scene and well-known Fourier optics tools.
“Synthesis of Computer Generated Holograms Using Layer-Based Method and Perspective Projection Images“, Vincent Brac de la Perriere; Valter Drazic; Didier Doyen; Arno Schubert, 2020 International Conference on 3D Immersion (IC3D).
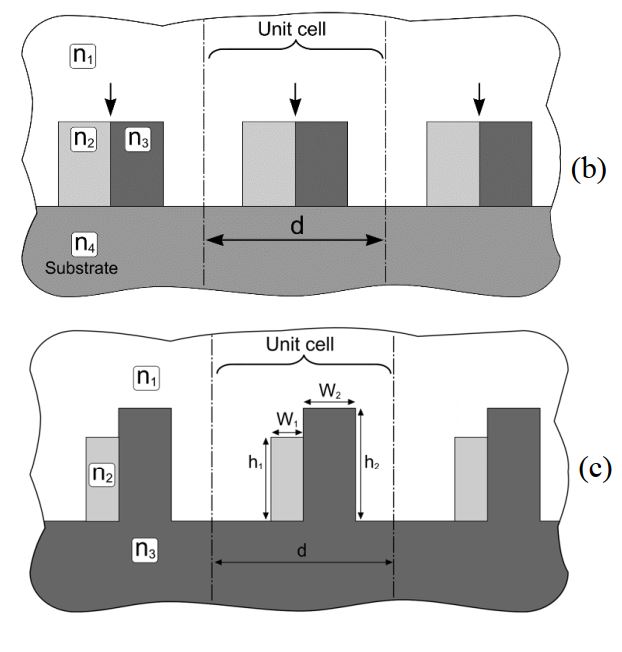
In this work we propose a solution for the creation of a nanojet focusing component based on a combination of two dielectric materials capable of managing the position of the focused beam in the near zone. We demonstrate that the double-material design of the elements of metagratings can be used to change its diffraction properties improving the diffraction efficiency and diffraction uniformity.
“High-uniformity, high-performance double material dielectric diffractive metagratings.“, O. Shramkova, V. Drazic, L. Blondé, B. Varghese, V. Allié, 14th International Congress on Artificial Materials for Novel Wave Phenomena – Metamaterial 2020, New-York, USA.
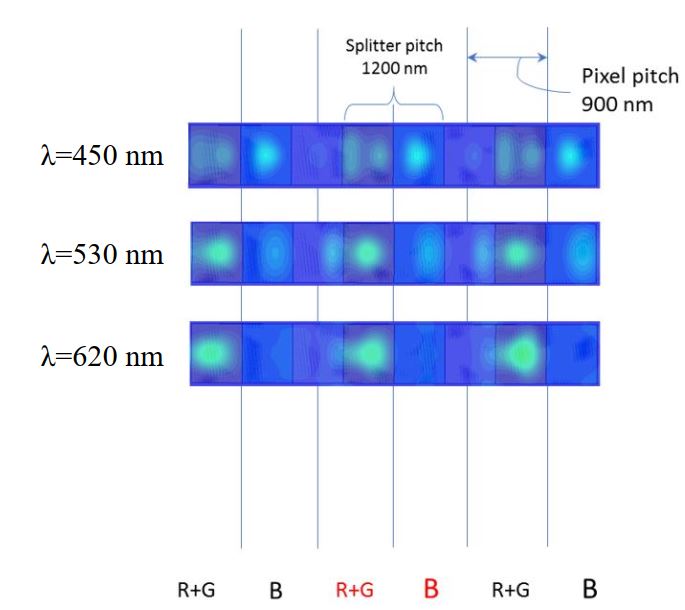
In this work we have developed new types of color splitters, which separate spectrally and spatially the light that falls on image sensors by exploiting the nanojet (NJ) beam phenomenon. The proposed method relies on light diffraction on the edges of constitutive parts of the studied multi-material elements embedded in a host medium with lower refractive index. Diffraction of light on the edge of a dielectric microstructure forms a tilted focused beam whose deviation angle depends on the refractive index ratio between the materials of the elements creating this edge. The characteristics of the generated NJ beams are also controlled by the geometry of multi-material elements (size and base angle of the edge) and the angle of wave incidence. Combination of two or more dielectric materials with different refractive indexes leads to the creation of multiple NJs with different angles of deviation, length and intensity. In the case of normally incident plane wave, the generated NJ beams originating from different edges of the constitutive parts of a multi-material microstructure, recombine and contribute to the formation of NJ beam deflection away from the normal direction in the near zone. The possibility to split color-bands of the incident light by combining two or more dielectric materials in such a way that the generated NJ beams create a spectrally dependent NJ beam deflection is discussed. We demonstrate that the proposed topologies of multi-material microlenses help to reduce the size of the color splitting element and optical crosstalk through the active Si layer. We show that the color splitting functionality of the proposed exists for inclined incident light as well. Applying these color splitters to actual image sensors allows to improve the optical efficiency by splitting the incoming light between the image sensor pixels, instead of filtering out part of the received light.
“Nanojet-based dielectric multi-material color splitters for image sensor applications.“, Oksana Shramkova*, Valter Drazic, Laurent Blondé, Bobin Varghese, Valérie Allié, SPIE Photonics Europe, April 2020, Strasbourg, France (Online).
In this paper we study high-intensity nanojet (NJ) beams generated at the output of dielectric multi-material elements. The proposed method for generating condensed optical NJ beams relies on the complex electromagnetic phenomenon associated with the light diffraction on the edges of constitutive parts of the studied system embedded in a host medium with lower refractive index. The possibility of NJ shift and deviation in the near zone of such a microstructure illuminated by a plane wave is demonstrated via a double-material microstructure. We examine the dependence of NJ beam behavior and orientation on the materials and dimensions of the constitutive parts.
“Photonic nanojet generated by dielectric multi-material microstructures.“, Oksana Shramkova*, Laurent Blondé, Valter Drazic, Bobin Varghese, Valérie Allié , META July 2019, Lisbon, Portugal.
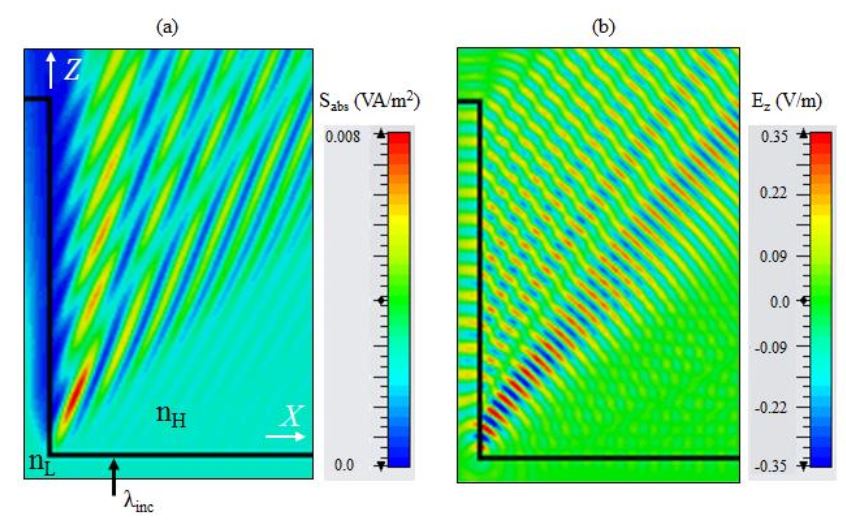
The diffraction of light from a right-angled, lossless dielectric step, illuminated by a plane wave, forms a tilted focused beam. Its deviation angle depends on the index ratio between the structure material and host medium. This paper will demonstrate the existence of a critical height of a wavelength sized edge. This edge diffracts the incident light energy inside the higher index medium, as a specific field distribution. The analysis, done for optical frequencies, identifies lobes in the resulting field distribution. The lobes repartition is driven by a critical height and its multiples. These EM patterns are evaluated in relation with the photonic nanojet phenomenon.
“Influence of an edge height on the diffracted EM field distribution“, Bobin Varghese, Oksana Shramkova, Valter Drazic, Valérie Allié, Laurent Blondé*, International Conference on Transparent Optical Networks, 9-13 July 2019, Angers, France.
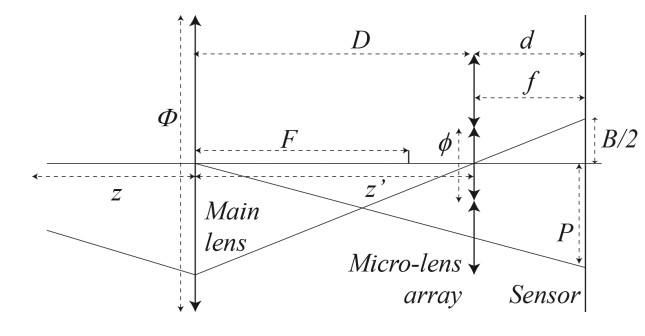
In this paper we study the light field sampling produced by ideal plenoptic sensors, an emerging technology providing new optical capabilities. In particular, we leverage its potential with a new optical design that couples a pyramid lens with an ideal plenoptic sensor. The main advantage is that it extends the field-of-view (FOV) of a main-lens without changing its focal length. To evince the utility of the proposed design we have performed different experiments. First, we demonstrate on
simulated synthetic images that our optical design effectively doubles the FOV. Then, we show its feasibility with two different prototypes using plenoptic cameras on the market with very different plenoptic samplings, namely a Raytrix R5 and a Canon 5D MarkIV. Arguably, future cameras with ideal plenoptic sensors will be able to be coupled with pyramid lenses to extend its inherent FOV in a single snapshot.
“Plenoptic Sensor : Application to Extend Field-of-View“, B. Vandame, V. Drazic, M. Hog, N. Sabater, 26th European Signal Processing Conference (EUSIPCO), Rome Sept. 3-7, 2018