In this paper we study the light field sampling produced by ideal plenoptic sensors, an emerging technology providing new optical capabilities. In particular, we leverage its potential with a new optical design that couples a pyramid lens with an ideal plenoptic sensor. The main advantage is that it extends the field-of-view (FOV) of a main-lens without changing its focal length. To evince the utility of the proposed design we have performed different experiments. First, we demonstrate on
simulated synthetic images that our optical design effectively doubles the FOV. Then, we show its feasibility with two different prototypes using plenoptic cameras on the market with very different plenoptic samplings, namely a Raytrix R5 and a Canon 5D MarkIV. Arguably, future cameras with ideal plenoptic sensors will be able to be coupled with pyramid lenses to extend its inherent FOV in a single snapshot.
“Plenoptic Sensor : Application to Extend Field-of-View“, B. Vandame, V. Drazic, M. Hog, N. Sabater, 26th European Signal Processing Conference (EUSIPCO), Rome Sept. 3-7, 2018
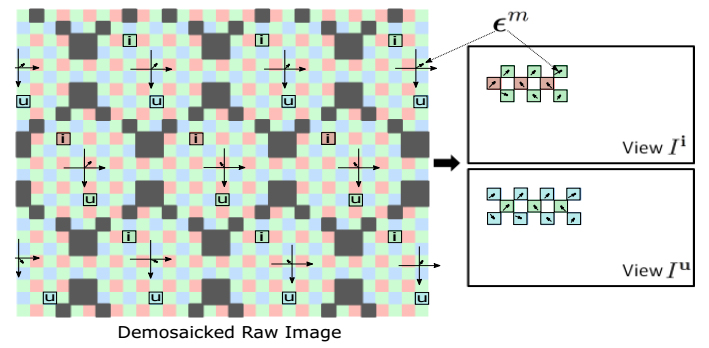
Light field imaging is recently made available to the mass market by Lytro and Raytrix commercial cameras. Thanks to a grid of microlenses put in front of the sensor, a plenoptic camera simultaneously captures several images of the scene under different viewing angles, providing an enormous advantage for post-capture applications, e.g., depth estimation and image refocusing. In this paper, we propose a fast framework to re-grid, denoise and up-sample the data of any plenoptic
camera. The proposed method relies on the prior sub-pixel estimation of micro-images centers and of inter-views disparities. Both objective and subjective experiments show the improved quality of our results in terms of preserving high frequencies and reducing noise and artifacts in low frequency content. Since the recovery of the pixels is independent of one another, the algorithm is highly parallelizable on GPU.
“On plenoptic sub-aperture view recovery“, Mozhdeh Seifi, Neus Sabater, Valter Drazic, Patrick Pérez, 24th European Signal Processing Conference (EUSIPCO), 29 Aug.-2 Sept. 2016
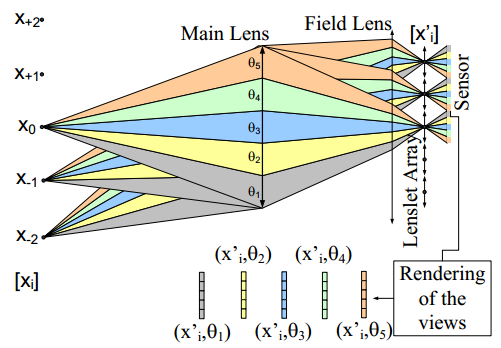
A plenoptic camera is a natural multiview acquisition device also capable of measuring distances by correlating a set of images acquired under different parallaxes. Its single lens and single
sensor architecture have two downsides: limited resolution and limited depth sensitivity. As a first step and in order to circumvent those shortcomings, we investigated how the basic design parameters of a plenoptic camera optimize both the resolution of each view and its depth-measuring capability. In a second step, we built a prototype based on a very high resolution Red One® movie camera with an
external plenoptic adapter and a relay lens. The prototype delivered five video views of 820 × 410. The main limitation in our prototype is view crosstalk due to optical aberrations that reduce the depth accuracy performance. We simulated some limiting optical aberrations and predicted their impact on the performance of the camera. In addition, we developed adjustment protocols based on a simple pattern and analysis of programs that investigated the view mapping and amount of parallax crosstalk on the sensor on a pixel basis. The results of these developments enabled us to adjust the lenslet array with a submicrometer precision and to mark the pixels of the sensor where the views do not register properly.
“Optimal design and critical analysis of a high-resolution video plenoptic demonstrator“, V. Drazic, JJ Sacré, A. Schubert, J. Bertrand, E. Blondé. Proceedings Volume 7863, Stereoscopic Displays and Applications XXII; 786318 (2011) , IS&T/SPIE Electronic Imaging, 2011, San Francisco
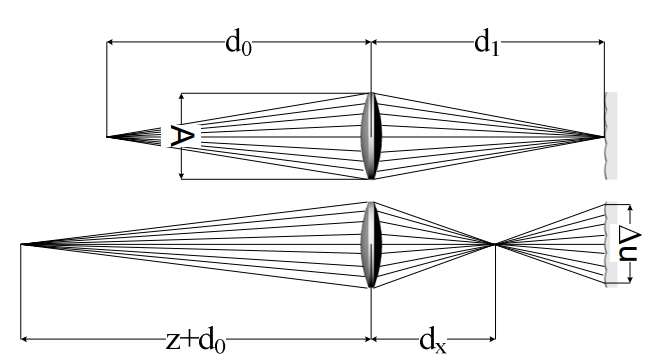
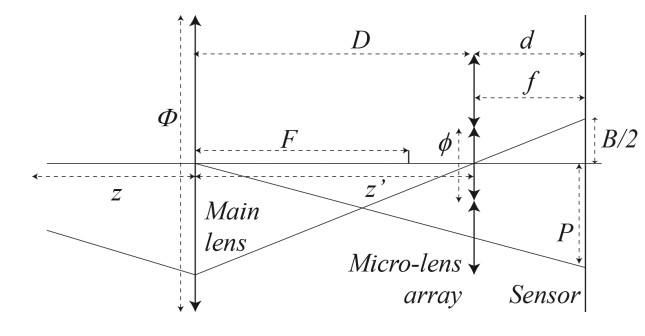
Plenoptic cameras1are able to acquire multi-view content that can be displayed on auto-stereoscopic displays. Depth maps can be generated from the set of multiple views. As it is a single lens system, very often the question arises whether this system is suitable for 3D or depth measurement. The underlying thought is that the precision with which it is able to generate depth maps is limited by the aperture size of the main lens. In this paper, we will explore the depth discrimination capabilities of plenoptic cameras. A simple formula quantifying the depth resolution will be
given and used to drive the principal design choices for a good depth measuring single lens system.
“Optimal Depth Resolution in Plenoptic Imaging“, V. Drazic, IEEE Internacional Conference on Multimedia and Expo, 19-23 July 2010, Singapore (ICMA 2010)