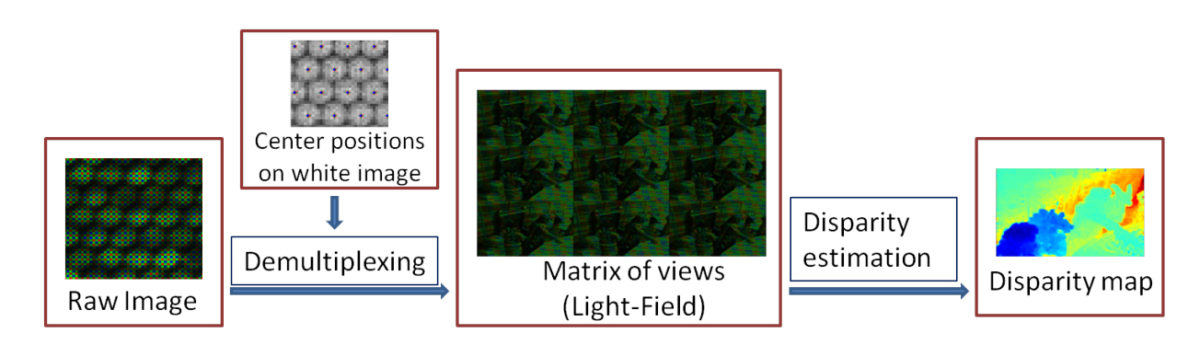
In this paper we propose a post-processing pipeline to recover accurately the views (light-field) from the raw data of a plenoptic camera such as Lytro and to estimate disparity maps in a novel way from such a light-field. First, the microlens centers are estimated and then the raw image is demultiplexed without demosaicking it beforehand. Then, we present a new block-matching algorithm to estimate disparities for the mosaicked plenoptic views. Our algorithm exploits at best the configuration given by the plenoptic camera: (i) the views are horizontally and vertically rectified and have the same baseline, and therefore (ii) at each point, the vertical and horizontal disparities are the same. Our strategy of demultiplexing without demosaicking avoids image artifacts due to view cross-talk and helps estimating more accurate disparity maps. Finally, we compare our results with state-of-the-art methods.
“Accurate Disparity Estimation for Plenoptic Images“, N. Sabater, M. Seifi, V. Drazic, G. Sandri, P. Perez, European Conference on Computer Vision (ECCV) 2014 Workshops.